Go to the source code of this file.
|
| subroutine | define_quadrics |
| |
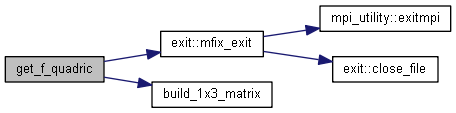
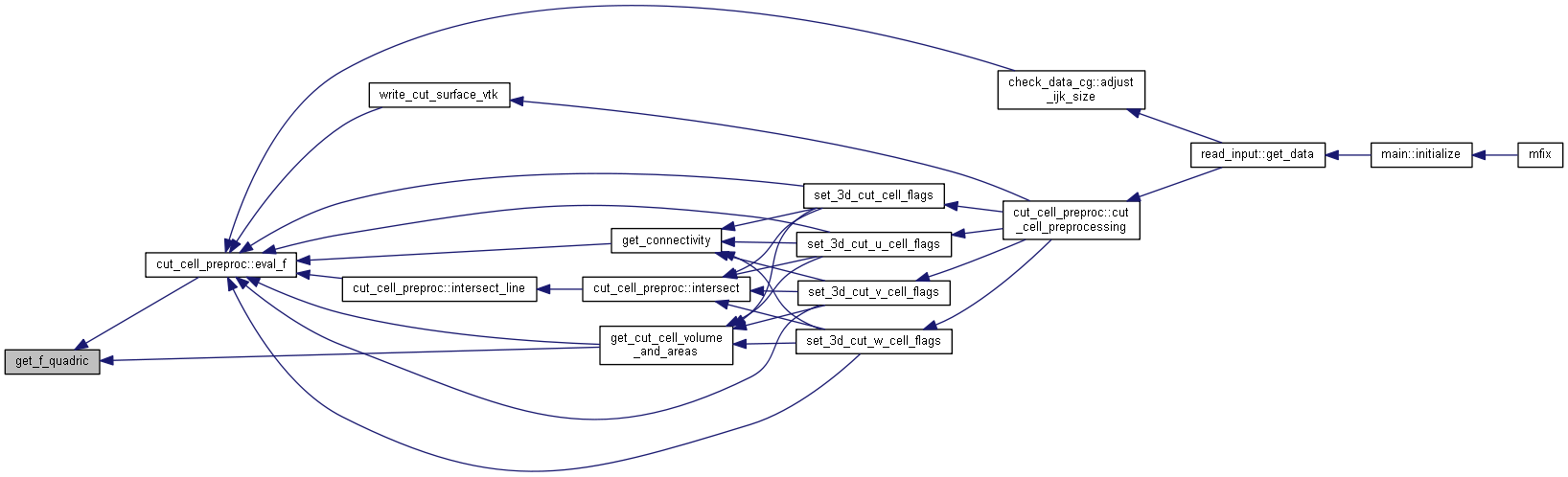
| subroutine | get_f_quadric (x1, x2, x3, Q_ID, f, CLIP_FLAG) |
| |
| subroutine | reasssign_quadric (x1, x2, x3, GROUP, Q_ID) |
| |
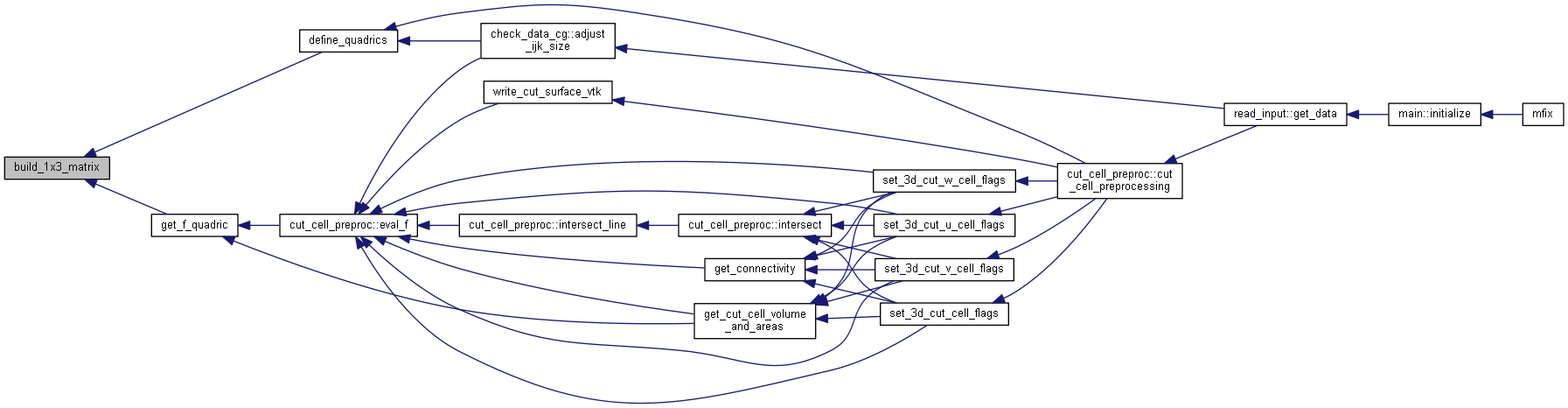
| subroutine | build_1x3_matrix (scalar1, scalar2, scalar3, M1x3) |
| |
| subroutine | build_c_quadric_matrix (lambda1, lambda2, lambda3, C_QUADRIC) |
| |
| subroutine | build_x_rotation_matrix (Theta, R) |
| |
| subroutine | build_y_rotation_matrix (Theta, R) |
| |
| subroutine | build_z_rotation_matrix (Theta, R) |
| |
| subroutine build_1x3_matrix |
( |
double precision |
scalar1, |
|
|
double precision |
scalar2, |
|
|
double precision |
scalar3, |
|
|
double precision, dimension(1,3) |
M1x3 |
|
) |
| |
| subroutine build_c_quadric_matrix |
( |
double precision |
lambda1, |
|
|
double precision |
lambda2, |
|
|
double precision |
lambda3, |
|
|
double precision, dimension(3,3) |
C_QUADRIC |
|
) |
| |
| subroutine build_x_rotation_matrix |
( |
double precision |
Theta, |
|
|
double precision, dimension(3,3) |
R |
|
) |
| |
| subroutine build_y_rotation_matrix |
( |
double precision |
Theta, |
|
|
double precision, dimension(3,3) |
R |
|
) |
| |
| subroutine build_z_rotation_matrix |
( |
double precision |
Theta, |
|
|
double precision, dimension(3,3) |
R |
|
) |
| |
| subroutine define_quadrics |
( |
| ) |
|
| subroutine get_f_quadric |
( |
double precision |
x1, |
|
|
double precision |
x2, |
|
|
double precision |
x3, |
|
|
integer |
Q_ID, |
|
|
double precision |
f, |
|
|
logical |
CLIP_FLAG |
|
) |
| |
| subroutine reasssign_quadric |
( |
double precision |
x1, |
|
|
double precision |
x2, |
|
|
double precision |
x3, |
|
|
integer |
GROUP, |
|
|
integer |
Q_ID |
|
) |
| |





 1.8.11
1.8.11