Track Objects¶
Now that the frame is processed and objects identified, the objects can be
tracked by selecting a tracking method from the Method drop-down list.
Poly Projection¶
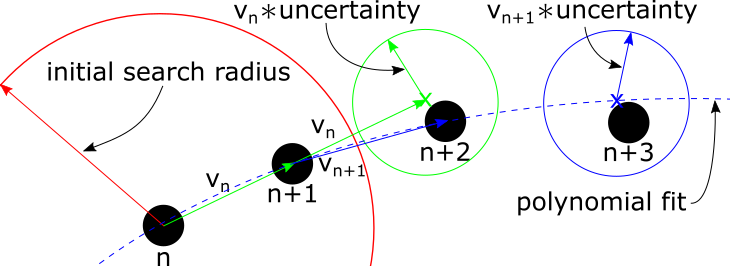
The poly projection algorithm is a projection based approach to finding the same object across successive frames. By fitting the past particle locations with a polynomial, the polynomial can be evaluated to predict where the particle location should be. For details of the algorithm see Poly Projection.
This first step in optimizing the tracking routine is to select appropriate
parameters affect the search radius. First, un-select the Filter tracks
check-box to see all the objects that are being tracked. Next, play with the
following three parameters, while moving forward and backward through the first
couple frames:
1. Initial search radius - The initial search radius is used to find the
closest object at \(n+1\). This radius should be just large enough to
capture the fastest moving object.
2. Uncertainty - The uncertainty is a multiplier on the velocity used to
grow or shrink the the subsequent search radius. This lets the search radius
change with changing velocities.
3. Minimum search radius - The minimum search radius is used to prevent the
subsequent search radius from getting to small. This is need to make sure that
objects that stop moving are still tracked because using a search radius of
\(r_{search}(n) = uncertainty*v(n-1)\) could end up being zero if the
velocity is zero.
Note
To see the search radius, go the visualization tab and select the
Show search check-box.
After the search radius have been optimized, move on to the polynomial settings.
Generally leaving the settings is fine. If the objects have little acceleration
and are moving linearly, turning off the polynomial by un-selecting the
Use polynomial check-box can increase the speed because the algorithm avoids
using a least-squares regression to fit the polynomials.
Finally, turn on the track filtering by selecting the Filter tracks
check-box. Setting a realistic maximum velocity and increasing the number of
consecutive points in the track can help reduce tracks connecting the wrong
particles.
Template Matching¶
The template matching algorithm tries to find similar objects across frames, within a user specified search area, by using a matching algorithm. The object that has the least difference is selected as the next point. This algorithm only works well with unique objects. For details of the algorithm, see Template Matching.
Similar to the poly projection routine, there are several parameters that need
to be adjusted to improve the tracking results. First, un-select the Filter tracks
check-box to see all the objects that are being tracked. Next, play with the
following parameters, while moving forward and backward through the first
couple frames:
1. Search radius - All objects in the search radius will be compared to
object. This radius should be large enough to capture the fastest moving object.
2. Template size - The template size is the length of pixels of a square
centered on the object to use in the matching routines. This length should be
slightly larger than the largest object.
3. Hash size - For the hashing techniques (dhash, ahash, and phash), the
length of the hash can be specified. The longer the hash, the more information
that is contained and compared to.
4. Maximum difference - This is the maximum difference or error that is
allowed for a successful match. If no objects have an error less than this, then
there are no matches and the track is finished.
Note
To see the search radius, go the visualization tab and select the
Show search check-box.
Finally, turn on the track filtering by selecting the Filter tracks
check-box. Setting a realistic maximum velocity and increasing the number of
consecutive points in the track can help reduce tracks connecting the wrong
particles.